摘要:SamuRoid 不是最强的人形机器人,但它很可能代表了一个更值得工业AI圈重视的方向,树莓派级别的低成本本体,开始与 ROS、多模态大模型、视觉语音交互和结构化教学模块结合,具身智能正在从“昂贵样机”变成“可开发平台”。

最近看到一款很典型、也很值得写的产品,SamuRoid。这是一台基于 Raspberry Pi 4 Model B 的 22 自由度仿生人形机器人,来自深圳小R Geek。按宣传口径,它支持 ROS、OpenCV、Python/C++、多模态大模型、语音交互、视觉识别、动作编排,还配了 RoboManager 这类面向教学和开发的可视化工具。
如果只把它看成“又一个树莓派机器人”,那就低估了它。
因为 SamuRoid 真正值得关注的,不是 22 自由度本身,也不是它能做几个武术动作,而是它正在呈现一个非常明确的趋势:低成本具身智能硬件,正在从玩具、教具,进化成可开发、可验证、可迁移的 embodied AI 平台。
这件事对工业AI、机器人研发、教育装备甚至未来工业软件的交互范式,都有启发意义。
一、先看硬件,它不是“高性能 humanoid”,而是“有完整开发闭环的轻量平台”
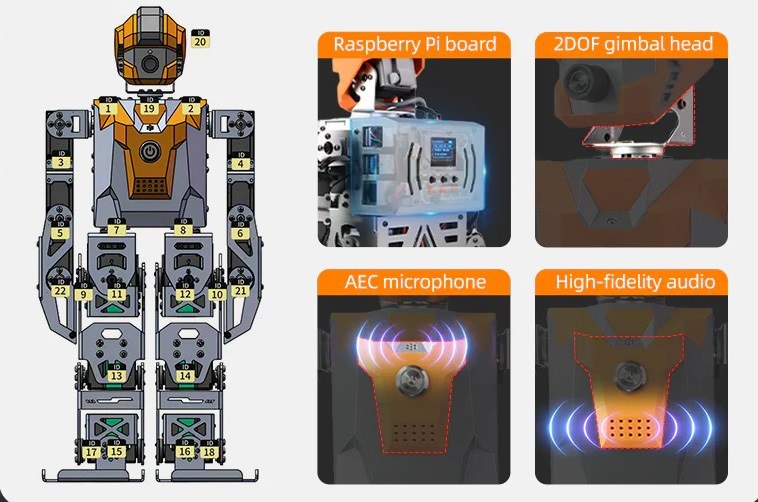
从公开资料看,SamuRoid 的关键配置包括:
- 主控:Raspberry Pi 4 Model B,4GB / 8GB 可选
- 自由度:22 DOF
- 执行器:22 个 XRS 系列总线舵机,12V 下扭矩不低于 30 kgf·cm
- 视觉:1080p 广角摄像头 + 2 自由度云台
- 传感器:MPU6050 六轴 IMU
- 语音:USB 麦克风 + 扬声器
- 显示:0.96 英寸 OLED 屏
- 连接:WiFi 5、蓝牙 5.0
- 电池:12V / 3000mAh,续航约 1 小时
- 控制与扩展:支持 PS2 手柄、40-pin GPIO 扩展、40+ 模块传感器接入
如果你站在波士顿动力或 Unitree 的视角看,它当然不算“强”。但如果你站在研发平台的视角看,这个组合其实很聪明。
因为它追求的不是把单机性能卷到极致,而是做出一套研究、教学、原型验证都能用的完整闭环:
- 有可用的人形本体
- 有足够数量的自由度支撑动作编排
- 有视觉、语音、姿态这些 embodied AI 的关键输入
- 有 ROS 和 OpenCV 这种熟悉的软件底座
- 有可视化动作工具,降低上手门槛
- 还有大模型接入,开始把“感知 + 交互 + 推理”串起来
这类产品的价值,不在于“最强”,而在于门槛足够低,同时系统性足够完整。
二、SamuRoid 比前几代树莓派机器人更重要的,不是多几个舵机,而是“多模态 + ROS”被绑在了一起
过去我们见过很多树莓派机器人,尤其是教育和 Maker 圈。
它们通常能做几件事:
- 控舵机
- 跑 OpenCV
- 跟随线条
- 识别人脸
- 播放几个预设动作
但这类平台往往停在“模块堆叠”阶段。也就是说,你知道它有视觉模块、有动作模块、有传感器模块,但这些能力并没有被统一成一个面向 embodied intelligence 的开发框架。
SamuRoid 比较新的地方就在于,它开始明确强调:
- Ubuntu 18.04 + ROS Melodic
- OpenCV 视觉任务
- 云端多模态大模型接入
- 语音、视觉、动作协同
- RoboManager 拖拽式动作编排
- 70+ 内置动作 + 10 套结构化课程
这不是简单加功能,而是在做一种“具身智能开发平台化”。
什么意思?
就是它不再只是告诉你“这台机器人能干嘛”,而是在尝试回答另一个更重要的问题:开发者、学生、研究者,能不能围绕它持续开发?
这点比单次演示更重要。因为未来机器人产业分化,很大程度上不会先发生在最顶级的人形机器人,而会先发生在谁能建立低门槛、可复制、可教学、可验证的开发平台。
三、树莓派 4 跑人形机器人,到底够不够?
这是个必须正面回答的问题。
如果有人因为宣传里写了“Multimodal LLM”“Large Language Models”,就以为 SamuRoid 能在树莓派 4 本地流畅运行一个强大的多模态大模型,那基本是不现实的。
树莓派 4 的算力边界非常清楚:
- 做 ROS 节点编排没问题
- 做 OpenCV 视觉任务没问题
- 做舵机控制和状态管理没问题
- 做一些轻量感知融合也可以
- 但真要本地跑成熟的大模型、多模态语义理解和复杂推理,明显不够
所以 SamuRoid 这条路线,本质上更像是:
树莓派负责本体控制和边缘感知,云端大模型负责高级语义理解与对话推理。
这其实恰恰是现实可行的路线。
因为今天大多数“可商用”的 embodied AI 系统,本来也不是把一切都压在本体上。本体更适合做:
- 低延迟控制
- 视觉数据采样
- 状态估计
- 动作执行
- 安全回路
而高层语义推理、复杂对话、多模态 reasoning,完全可以通过云端模型完成。
所以别把 SamuRoid 的局限看成缺点,它反而把一个今天最实际的机器人架构展示得很清楚:端侧做控制,云侧做认知。
四、为什么说这种平台对工业AI圈也有意义
很多人一看这种产品,会下意识把它归类成“教育机器人”或者“消费级人形玩具”。
但如果你把视角放宽一点,会发现它的意义没那么窄。
工业AI圈真正关心的不是这台机器人会不会跳舞,而是:
- 低成本本体能不能稳定采集 embodied 数据
- 多模态交互能不能在真实执行器上验证
- 语音、视觉、动作三者能不能形成一个可开发的闭环
- ROS 生态能不能继续承接大模型调度和技能编排
- 工程团队能不能用一个便宜得多的平台快速试错
从这个角度看,SamuRoid 的作用更像一个低成本 embodied AI 沙箱。
在未来几年里,很多看起来“属于工业机器人”的智能交互层,未必先在昂贵产线机器人上完成验证,反而更可能先在这种平台上被验证:
- 视觉语义理解怎样映射到动作执行
- 自然语言任务怎样拆成一系列机械动作
- 大模型怎样在不稳定物理环境里调用技能
- 姿态恢复、状态诊断、故障提示怎样和语音系统结合
- 人机协作界面怎样从按钮菜单转向自然语言 + 视觉反馈
也就是说,工业 embodied AI 的很多上层能力,未来很可能是在“便宜但完整”的机器人平台上先成熟。
五、它最值得写的一个点,其实是“平台化教学”
SamuRoid 还有一个很容易被忽略、但我认为很重要的点:它不只是卖硬件,而是在卖一整套学习路径。
公开资料里提到,它预装了 70 多套动作,并配了 10 个结构化学习模块,从快速入门,到 OpenCV 视觉,再到 LLM 实验,都有配套内容。再加上 RoboManager 的 PC / Android 工具,可以拖拽动作、实时看关节角度、电压、温度反馈。
这个设计很聪明。
因为机器人开发最难的地方之一,不是缺硬件,而是缺“可渐进学习的系统入口”。
如果一个平台只有 ROS 和一堆源代码,门槛就太高。只有拖拽动作,又太浅。真正好的开发平台,必须同时支持三层人群:
- 初学者 可以先拖拽、先调用现成功能
- 中级开发者 可以写 Python / C++ 节点、调视觉、改动作
- 高级开发者 可以接大模型、改系统架构、做 embodied AI 实验
SamuRoid 显然想把这三层打通。
从产业角度看,这比“会做几个酷炫 demo”更重要。因为平台一旦能承接学习路径,它就更容易形成生态,而生态才是长期价值所在。

六、当然,它的短板也很明显
这篇文章如果只夸,就没意思了。SamuRoid 的短板同样很清楚。
1. 软件底座偏老
它用的是 Ubuntu 18.04 + ROS Melodic。这套组合确实稳定,也在教育和机器人圈广泛使用,但已经 EOL。短期看,它有利于兼容大量旧教程和旧代码;长期看,这会成为升级负担。
2. 大模型能力更多是“接入式”,不是“原生式”
宣传里说支持 DeepSeek、豆包、通义千问,但这更多是云调用整合,不等于机器人自己具备很强的本体认知能力。真正原生的 embodied intelligence 还远远谈不上。
3. 1 小时续航和 2.3kg 级别,决定了它不是高强度任务平台
它更适合实验、教学、展示、算法验证,不适合长时间连续复杂执行。
4. 22 DOF 虽然够做很多动作,但仍然有限
它足够支撑双足、人形姿态和一些操作演示,但离高自由度复杂 manipulation 还有明显距离。
所以,SamuRoid 不该被误读成“低价版通用人形机器人”,它更准确的定位是:一台足够完整、足够可开发的轻量具身智能平台。
七、写在最后,真正值得关注的不是这台机器人,而是它代表的方向
如果只看参数,SamuRoid 可能不会让所有人惊艳。
树莓派 4,不新。22 自由度,不算夸张。ROS Melodic,甚至已经偏老。多模态大模型,也主要是云端接入。
但如果把这些元素放在一起,你会发现它正在代表一个更重要的趋势:
具身智能正在从少数实验室和大厂内部样机,慢慢变成更多人可以开发、试错、教学、验证的平台。
这个趋势很关键。
因为未来真正推动机器人产业扩张的,不只是最强的机器人,而是有多少人能开始上手开发机器人智能。
从这个角度看,SamuRoid 这类产品的价值并不在于它今天有多像人,而在于它可能帮助更多团队更早进入 embodied AI 的开发循环。
对工业AI圈来说,这一点尤其值得重视。很多明天会进入工厂、仓储、巡检、服务和人机协作系统的“智能层”,今天未必先在重资产平台上成熟,反而更可能在这些低成本本体上先被打磨出来。
所以,SamuRoid 最值得看的,不是它会不会打一套拳,而是它正在说明:低成本人形机器人,已经开始从展示品变成开发平台。
这一步,比参数上的任何小升级都重要。
参考资料:
- CNX Software 对 SamuRoid 的产品报道
- XiaoR GEEK 官方产品页与技术介绍
- 公开渠道中关于 RoboManager、ROS Melodic、OpenCV 与 LLM 集成的说明